En primer lugar vamos a la definición:
El sistema diédrico es un método
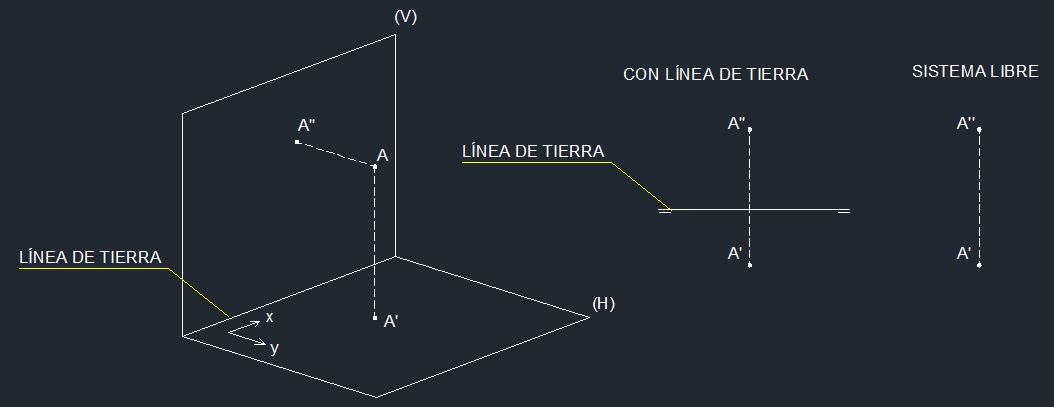
de representación geométrica de los elementos del espacio tridimensional sobre
un plano mediante la proyección cilíndrica ortogonal sobre dos planos de
proyección ortogonales.
Este sistema de planos se denomina diedro, de forma que
uno de los planos se abate sobre el segundo permitiendo la representación de
las proyecciones de los elementos en un único plano (Figura 1).
En caso de
fijar la posición de los planos de proyección, aparecerá una línea de corte de
ambos planos denominada “línea de tierra”. En caso de mantener libre la
posición de los planos de proyección, nos referiremos al sistema diédrico
directo, sistema libre, o sistema sin línea de tierra.

Figura 1
En el sistema diédrico con línea de tierra emplearemos fundamentalmente los abatimientos mientras que en el sistema libre aplicaremos
los teoremas ya conocidos de Thales (para conocer la forma) y Pitágoras (para
conocer la medida) (Figura 2).


Para ver las diferencias entre el
uso o no de la línea de tierra observamos el ejemplo de la figura 4. Partiendo
de las proyecciones ortogonales, el caso tradicional (figura de la izquierda)
es el uso de la línea de tierra, la cual aparece como la intersección de los planos de
proyección (horizontal y vertical). En el ejemplo se representan dos puntos
situados en la misma proyección respecto al plano horizontal (H), donde la situación
relativa entre ambos puntos se establece por la distancia vertical que
mantienen (Dz).









Figura 2

Figura 3

En la figura de la derecha corresponde al concepto del sistema libre, donde se observa que el desplazamiento del plano de
proyección horizontal (H1) mantiene la misma distancia relativa entre los
puntos (Dz).
Por tanto, en el sistema directo, lo importante no es la situación de
los elementos respecto a la intersección de los planos de proyección horizontal
y vertical, sino la situación relativa de los elementos entre sí.
Figura 4

A partir de aquí se desarrolla todo el sistema partiendo del elemento básico del punto. En el caso de una recta, la proyectaremos como la unión de dos puntos, mientras que para un plano se usarán tres puntos.
En la
figura 5 se representa una recta (r). En la figura de la izquierda está dibujada
con la línea de tierra, a partir de la cual se consideran las coordenadas y, z
de las proyecciones de los puntos A, B. En la figura de la derecha se
representa esa misma recta en el sistema libre sin el uso de la línea de tierra,
a partir de las coordenadas relativas entre los dos puntos. Estas coordenadas
se mantendrán constantes independientemente de la posición de la línea de
tierra.
Figura 5

Para conocer la verdadera magnitud (VM) de la recta r entre
los puntos AB, en caso de usar la línea de tierra se realiza un abatimiento de
un plano de perfil (P) que contenga la recta (r). En la figura 6 aparece representada
la operación para la recta ejemplo
Figura 6

En el caso del diédrico directo
tenemos que analizar el problema desde el punto de vista de las coordenadas
relativas de los puntos. En la figura 7 se representa la recta ejemplo. Se
puede observar la construcción de un triángulo rectángulo, donde la hipotenusa
es la recta en verdadera magnitud (VM), el cateto mayor es la proyección de la
recta sobre el plano horizontal (r’) y el cateto menor es la diferencia relativa
de la coordenada Z de los dos puntos A,B (Dz).
A partir de esta construcción y usando el principio de Pitágoras, se puede
calcular la verdadera magnitud en el sistema directo, construyendo la
hipotenusa a través de los datos conocidos de los catetos. En la Figura 8 se ha
dibujado la solución.
Figura 7

Figura 8

Una vez que hemos visto su definición vamos a analizar los siguientes conceptos fundamentales
Línea de máxima pendiente de
un plano:
Se define como la recta que
pertenece al plano (P) y que forma el mayor ángulo con el plano horizontal (H).
Por tanto, corresponderá a una recta cuya proyección horizontal será
perpendicular a la traza horizontal del plano que la contiene, así como de
cualquier otra recta horizontal del plano (Figura 9)
Figura 9

Por tanto, para calcular la línea
de máxima pendiente de un plano tanto con línea de tierra como en el sistema
libre, tendremos que realizar la intersección de dicho plano con un plano
horizontal, para posteriormente trazar la recta perpendicular a la proyección horizontal
de la recta intersección de ambos planos (Figura 10)
Figura 10

Abatimientos:
Para el análisis de los abatimientos vamos a desarrollar un
caso genérico. Se basa en la construcción de un triángulo equilátero
perteneciente al plano H, con uno de los lados paralelo a la proyección
horizontal de dicho plano, de lado 10 cm y con baricentro en el punto P.
Su desarrollo mediante el uso de la línea de tierra (Figura 11) pasa por
el abatimiento del plano H tomando su proyección horizontal (h’) como eje de
giro. A partir del abatimiento del baricentro P, se construye el triángulo, el
cual se traslada a las proyecciones horizontales y verticales mediante rectas
contenidas en el plano.
Figura 11

En el caso del sistema libre
(Figura 12) para su construcción solo se necesita de la proyección horizontal
del plano y de las coordenadas z relativas de cada punto. A partir de estos
datos, trasladamos el punto (P) del baricentro a verdadera magnitud (Po).
Construimos el triángulo, para posteriormente trasladar mediante afinidad los
vértices a la proyección horizontal. Finalmente proyectamos su vista vertical
mediante las coordenadas z de cada punto tomadas en la verdadera magnitud.
Figura 12

Buena comparación al llevarlos en paralelo.
ResponderEliminar